Processing – Controlando o Atmega328 com PWM no Standard Firmata
Este pequeno tutorial descreve os passos que fiz para construir a interface de controle do motor e um led pelo computador. O primeiro passo é fazer o upload do código “Standard Firmata” para o Atmega Arduino. Este código está na sessão da biblioteca Firmata da IDE Arduino, é uma versão do firmware específico para controle pelo Processing. Após o upload, nenhum comando funcionará direto no Arduino, os comandos deverão ser passados através da codificação no Processing pela porta serial.
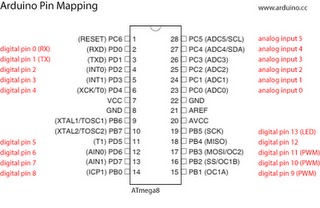
O Arduino foi montado em uma Protoboard seguindo o esquema descrito a seguir, para acesso ao computador utilizei um conversor USB-TTL, este conversor possibilita o acesso pela porta USB com o Arduino e pode ser encontrado facilmente na Internet. Comprei o meu por R$ 26,00.

Pulse-width modulation (PWM) pode ser desenvolvido no Arduino de vários modos. O texto a seguir mostra de forma simples de como usar essa técnica para controlar a velocidade de um pequeno motor e um led através do computador. O código no Processing utiliza a mesma estrutura do exemplo proposto no exemplo “Fade” do Arduino.
/*
Fade
This example shows how to fade an LED on pin 9
using the analogWrite() function.
This example code is in the public domain.
*/
int brightness = 0; // how bright the LED is
int fadeAmount = 5; // how many points to fade the LED by
void setup() {
// declare pin 9 to be an output:
pinMode(9, OUTPUT);
}
void loop() {
// set the brightness of pin 9:
analogWrite(9, brightness);
// change the brightness for next time through the loop:
brightness = brightness + fadeAmount;
// reverse the direction of the fading at the ends of the fade:
if (brightness == 0 || brightness == 255) {
fadeAmount = -fadeAmount ;
}
// wait for 30 milliseconds to see the dimming effect
delay(30);
}
O que é PWM?
A Modulação por largura de pulso (MLP) - mais conhecida pela sigla em inglês "PWM" (Pulse-Width Modulation). Também é utilizada para variar o valor da transferência de potência entregue a uma carga sem as perdas ocorridas normalmente devido à queda de tensão por recursos resistivos. Em um sistema PWM, a chave de estado sólido (normalmente IGBT, MOSFET ou transistor bipolar) usada para controlar o fluxo de corrente: ora não conduzindo corrente, ora conduzindo, mas provocando uma queda de tensão muito baixa; como a potência instantânea dissipada pela chave é o produto da corrente pela tensão elétrica a um dado instante, isso significa que nenhuma potência é dissipada se a chave fosse uma chave "ideal". Com uma taxa de modulação suficientemente elevada, simples filtros RC são freqüentemente utilizados para suavizar o trem de pulsos em uma tensão analógica estável. Esse método é normalmente empregado no controle de velocidade de motores de corrente contínua.
Origem: Wikipédia, a enciclopédia livre.
Neste projeto, eu controlo um pequeno motor de corrente contínua de 6 Volts através de um MOSFET utilizando o PWM do arduino e também exibo o valor referente à velocidade na tela do computador. O controle da velocidade é feito por um programa no Processing, que se comunica com o arduino através da porta serial e envia valores para a mudança da velocidade. Esses valores variam de 0 a 255.
Referencia: http://processing.org/learning/
A seguir, veja o desenho na Protoboard de todos os componentes eletrônicos para o projeto.



=============================================================================
Na programação, criei dois módulos, o primeiro com os comandos para o controle no Arduino e o segundo com a classe de controle dos botões.
ArduinoControlPotMotors.pde
ClassButtons.pde
A codificação é auto descritiva para quem já conhece a linguagem, quem ainda não está familiarizado pode acessar os Sites para mais informações.
Abs, Marcelo Victorio A. Costa.
ArduinoControlPotMotors.pde
// By Marcelo Victorio A. Costa
// 23/06/2011
import processing.serial.*;
import cc.arduino.*;
Porta serial para a comunicação com o arduino;
//[0] "COM1"
//[1] "COM3"
int pCOM = 1;
int pino_led = 7;
int pino_sensor_Pot = 3;
int valor_capturado_Pot = 0;
PFont arial;
int w = width;
int h = height;
Cbutton CB1 = new Cbutton(600, 450, 80, 30,"Led1");
Cbutton CB2 = new Cbutton(700, 450, 80, 30,"Exit");
void setup()
{
size(screen.width / 2, screen.height / 2);
background(0);
ellipseMode(CENTER);
println(Arduino.list());
arduino = new Arduino(this, Arduino.list()[pCOM], 57600);
arduino.pinMode(pino_sensor_Pot, Arduino.INPUT);
arduino.pinMode(pino_led, Arduino.OUTPUT);
arial = createFont("Arial",50);
println(width);
}
void draw()
{
// captura o valor do potenciômetro
valor_capturado_Pot = arduino.analogRead(pino_sensor_Pot);
background(200);
// usa o valor capturado para alterar o diâmetro do círculo
fill(255,80,80);
ellipse(width / 2, height / 2, valor_capturado_Pot/2, valor_capturado_Pot/2);
//println(valor_capturado_Pot);
//println(height);
textFont(arial);
fill(0,0,0);
text(valor_capturado_Pot/4,50,80);
delay(100);
arduino.analogWrite(9,valor_capturado_Pot / 4);
//Buttons Control
if (CB1.button()) {
arduino.digitalWrite(pino_led, Arduino.HIGH); // set the LED on
}
else{
arduino.digitalWrite(pino_led, Arduino.LOW); // set the LED off
}
if (CB2.button()) {
exit();
}
}
ClassButtons.pde
// By Marcelo Victorio A. Costa
// 23/06/2011
class Cbutton {
int bx, by, bs, bt;
String sNome;
boolean locked = false;
PFont arialButtons;
Cbutton (int pbx, int pby, int pbs, int pbt, String psNome) {
bx = pbx;
by = pby;
bs = pbs;
bt = pbt;
sNome = psNome;
}
boolean button() {
arialButtons = createFont("Arial",15);
textFont(arialButtons);
// Test if the cursor is over the box
if (mouseX > bx && mouseX < bx+bs && mouseY > by && mouseY < by+bt) {
drawbutton(255);
if (mousePressed && (mouseButton == LEFT)) {
drawbutton(225);
locked = true;
}else{
locked = false;
}
}else{
drawbutton(150);
locked = false;
}
return locked;
}
void drawbutton(int pCollor) {
stroke(100);
fill(pCollor);
rect(bx, by, bs, bt);
fill(0);
text(sNome,bx+25,by+20);
}
}
Nenhum comentário:
Postar um comentário